
הפקולטה להנדסה - המגמה להנדסה מכאנית
רובוט
לניתוחים כירורגים מדוייקים
פרוייקט
מס' 110
פרוייקט גמר
שם המבצע: אלכס פרוכטמן 011284593
שם המנחה: מרדכי וקסמן
מקום הביצוע: אוניברסיטת תל אביב
תקציר מנהלים
רובוט לניתוחים
כירורגים מדוייקים
מטרת הפרוייקט
פרויקט זה הינו חלק מן הפרויקט
לתכנון רובוט לניתוחים כירורגיים מדוייקים. פרוייקט זה מתמקד בבחירת מערכת אופטית,
ובתכנון המנגנונים המכאניים של רובוט לניתוח הסרת גידול פנימי בעזרת מספר כלי
ניתוח (סכין חיתוך, מלקחיים וכלי תפירה).
עקרון עבודת הרובוט מתבסס על שיטת
לפראסקופיה, בה מתבצע הניתוח דרך חתכים זעירים בגוף החולה. פעולה זו דורשת רמת
דיוק גבוהה יותר מאשר בשיטת הניתוח הקונבנציונאלית, בה מבוצעים חתכים ארוכים בגוף
החולה.
מספר אלמנטים מכאניים וחשמליים
מרכיבים את הרובוט, אינטגרציה ושיתוף פעולה נכון בין האלמנטים מספק רמת דיוק גבוהה
בעת ביצוע הניתוח.
רמת דיוק בהסרת גידול מוגדרת על
ידי שלושה גורמים:
עומק
החדרת כלי הניתוח (תנועה צירית - לאורך ציר Z ).
כיוון
עדין של כלי הניתוח (תנועה צידית - לאורך ציר X ).
הפעלה
עדינה ומדויקת של כלי הניתוח הספציפי.
רמת דיוק גבוהה ניתנת להשגה בעזרת
רובוט מתוחכם המותקן על גבי זרוע מכאנית אשר מחוברת לשולחן הניתוח, ומעקב מקרוב
במהלך הניתוח בעזרת מערכת אופטית פנים גופית.
רובוט זה הינו מערכת ייעודית
המאפשרת טיפול בחולה שבגופו התגלה גידול ומאפשרת טיפול נוח ויעיל בחולה זה.
דרישות רפואיות:
דרישות אלו אינן הנדסיות או טכניות
אך הן מכריעות בתכנון הרובוט בדומה לדרישות ההנדסיות.
1.
מטרת הרובוט לשמש בניתוח הסרת גידול פנימי (בשיטת לפראסקופיה).
2.
הרובוט צריך לעמוד בתקנים רפואיים, ועל כן חלקי הרובוט החיצוניים וכלי
הניתוח חייבים להיות עשויים מחומר אנטי קורזבי אשר יכול לעבור תהליך סטרליזציה.
3.
הרובוט יעבוד עם מספר כלי ניתוח (סכין חיתוך, מלקחיים וכלי תפירה), ועשוי אף
להוות אלטרנטיבה לניתוח הסרת גידול שכיום מתבצע בשיטה הקונבנציונאלית.
דרישות הנדסיות:
1.
מהרובוט נדרשת אפשרות תנועה בכל מרחב שולחן הניתוח.
2.
ניתן יהיה לנעול את הרובוט בכל מצב נדרש, ולשחרר את הנעילה בעת הצורך.
3.
משקל מערכת הרובוט, אשר מורכבת בחלקה העליון של הזרוע המכאנית, יהיה קטן מ-
10 קילוגרם, על פי דרישה זו תוכננה הזרוע המכאנית בעבר.
4.
ממדי הרובוט חייבים להיות סבירים, על מנת שניתן יהיה לחברו לשולחן
הניתוחים.
5.
על הרובוט להיות קל מספיק על מנת
שניתן יהיה להעבירו ממקום למקום.
6.
מערכת הרובוט תכלול מערכת אחסנת כלים שתאכסן מספר כלי ניתוח (סכין חיתוך,
מלקחיים וכלי תפירה).
7.
על הרובוט לבצע את תהליך החלפת כלי הניתוח בעצמו, ללא התערבות חיצונית של
הרופא המנתח.
8.
הרובוט יכלול מערכת אופטית אשר תוחדר לגוף החולה ותציג בזמן אמת את אזור
הניתוח.
9.
הרובוט יהיה פשוט לתפעול, נוח לתחזוקה ובטיחותי.
10. על הרובוט להיות
בעל עלות סבירה (לא יקרה).
מהות העבודה
פרוייקט זה מתמקד בבחירת מערכת
אופטית, ובתכנון המנגנונים המכאניים של רובוט לניתוח הסרת גידול פנימי בעזרת מספר
כלי ניתוח (סכין חיתוך, מלקחיים וכלי תפירה).
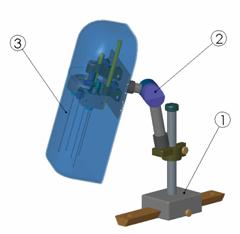
באופן כללי ניתן לתאר את הרובוט על
פי האלמנטים הבאים:
- מערכת אופטית - מערכת פנים גופית
לשימוש הרופא המנתח. האזור המנותח מוצג בזמן אמת על צג טלויזיוני, ובה בעת
מאפשרת המערכת האופטית להקליט את מהלך הניתוח לצרכים עתידיים.
- בסיס - חלקו התחתון של
הרובוט. תפקידו לשאת בנטל המשקל של הרובוט על כל חלקיו, לאפשר תנועה על גבי
מסילה בצד שולחן הניתוח, וקיבוע הרובוט לשולחן הניתוחים בעת הצורך.
- מערכת שינוי גובה - תפקידה לחבר בין
הבסיס לזרוע המכאנית, ולשנות את גובה הרובוט.
- זרוע מכאנית - מערכת הרובוט מורכבת
על זרוע מכאנית אשר תוכננה בעבר כפרויקט גמר. הזרוע מאפשרת למנתח למקם באופן
ידני את מערכת הרובוט בכל נקודה רצויה במרחב שולחן הניתוח, ולנעול את המערכת
במצב סטטי נתון.
- מערכת הפעלת כלי ניתוח - בעלת שלושה תפקידים:
החדרת כלי הניתוח לעבר הגידול בגוף החולה, כיוון עדין של כלי הניתוח ביחס
לגידול, והפעלה עדינה ומדוייקת של כלי הניתוח הספציפי.
- מערכת אחסנת כלים - מערכת הרובוט מכילה
מערכת אחסנת כלים המאחסנת את הכלים הדרושים לביצוע הניתוח. מערכת אחסנת הכלים יכולה להכיל בתוכה עד ארבעה כלי
ניתוח שונים (סכין חיתוך, מספרי חיתוך, מלקחיים וכלי תפירה).
- מערכת החלפת כלים - כלי הניתוח מוחלפים בעת הצורך בין מערכת
הפעלת כלי ניתוח למערכת אחסנת כלים בעזרת מערכת החלפת כלים, וזאת על מנת
לאפשר את המשך עבודת הרובוט עם כלי חדש. החלפת הכלים מתבצעת בתוך מערכת
הרובוט ללא התערבות חיצונית של הרופא המנתח, ומבלי לשחרר את הרובוט מהמצב
הסטטי בו הוא נמצא.
הפתרון הנבחר
רובוט קומפקטי, קל לתמרון, ובעל
משקל קטן יחסית. הרובוט מחובר לבסיס, על מנת לאפשר תנועה על גבי מסילה בצד שולחן
הניתוח, וקיבוע הרובוט לשולחן הניתוחים בעת הצורך. מערכת לשינוי גובה הרובוט מחברת
בין הבסיס לזרוע המכאנית, ומאפשרת לשנות את גובה הרובוט ביחס למנותח.
על מנת לקבל דיוק מרבי, המערכת הרובוטית מחוברת לזרוע מכאנית
קשיחה אשר נושאת בכוחות וברעידות הפועלים כתגובה על הרובוט. הזרוע המכאנית מאפשרת
למנתח למקם באופן ידני את מערכת הרובוט בכל נקודה רצויה במרחב שולחן הניתוח, ניתנת
לקיבוע על ידי נעילת הזרוע בכל קונפיגורציה רצויה, ומאפשרת לשחרר את הנעילה עם
סיום עבודת הרובוט. נעילת חופש התנועה של הזרוע מתבצעת בעזרת מנגנון קל להפעלה המאפשר
למנתח למקם את הזרוע ומערכת הרובוט המחוברת אליה ביד אחת ולנעול אותם בעזרת היד
השניה.
מערכת הרובוט מכילה מערכת הפעלת
כלי ניתוח בעלת שלושה תפקידים. החדרת כלי הניתוח לעבר הגידול בגוף החולה, כיוון
עדין של כלי הניתוח ביחס לגידול, והפעלה עדינה ומדוייקת של כלי הניתוח הספציפי.
מערכת הרובוט מכילה מערכת אחסנת כלים המאחסנת בתוכה את הכלים
הדרושים לביצוע הניתוח. מערכת אחסנת הכלים יכולה להכיל בתוכה עד ארבעה כלי ניתוח
שונים (סכין חיתוך, מספרי חיתוך, מלקחיים וכלי תפירה).
כלי הניתוח מוחלפים בעת הצורך בין מערכת הפעלת כלי ניתוח
למערכת אחסנת כלים ולהיפך בעזרת מערכת החלפת כלים, על מנת לאפשר את המשך עבודת
הרובוט עם כלי חדש. החלפת
הכלים מתבצעת בתוך מערכת הרובוט ללא התערבות חיצונית של הרופא המנתח, ומבלי לשחרר
את הרובוט מהמצב הסטטי בו הוא נמצא.
מערכת הרובוט מכוסה במכסה פלסטי שקוף,
המגן על מכלולי מערכת הרובוט. ויחד עם זאת, מאפשר לבקר את מהלך הניתוח מבחינת
תקינות מערכת הרובוט ואופן פעולתה.
תוצאות ומסקנות
בפרוייקט
זה תכננתי את המרכיבים של רובוט לניתוחים כירורגיים מדוייקים, וכמו כן, בחרתי
מערכת אופטית פנים גופית שתסייע למנתח בעבודה עם הרובוט. עקרון הפעולה של הרובוט
מבוסס על שיטת לפראסקופיה, וכמו כן, החלפת כלי הניתוח מתבצעת ע"י מערכת
הרובוט ללא התערבות הרופא המנתח.
קדמה לעבודת התכנון, עבודת הכנה ארוכה שכללה סקירה של מערכות
רובוטיות קיימות לניתוחים בשוק ולימוד שיטת לפראסקופיה (שכלל ביקורים בבית חולים
תל השומר).
שמתי דגש בתכנון המערכות המכאניות בלבד. צורת העבודה דרשה הפקת
שרטוטים ובמקביל ביצוע חישובים, שכן האחד גורר את השני. חישובי החוזק לעתים שינו
את הגדלים הגאומטרים ו/או בחירת חומרים מתאימים אותם תכננתי בקונצפט הראשוני.
למרות שלא נדרשתי להתחשב בצד הכלכלי, שיקול זה הנחה אותי רבות
בתכנון החלקים השונים ובבחירת החומרים מהם עשויים החלקים.
פרוייקט
זה היווה עבורי התנסות ראשונה בתכנון מכאני כולל ואפשר לי להבין טוב יותר את מהות
המקצוע ותחומי התפרסותו.