
הפקולטה
להנדסה - המגמה להנדסה מכנית
יוני 2002
רובוט לסימון מטרות
בלייזר
תקציר לספר ספר
הפרוייקטים
פרוייקט גמר
הכין: כהן אורי
מקום הביצוע: אוניברסיטת ת"א
מנחה:ד"ר
רמי אורון

תקציר מנהלים
טלאופרטור
לסימון מטרות בלייזר
שדה
הקרב המודרני שונה מאוד משדה הקרב המוכר לנו מספרי ההיסטוריה. כיום בניגוד לימים
עברו תחכום ויתרון טכנולוגי בשדה הקרב יכולים להטות את כף המאזניים, לכן פיתוח
אמצעים אשר יעמדו לרשותם של הלוחמים בשדה הקרב ויעזרו להם בהשגת המטרות הטקטיות
תוך סיכון מינימאלי של חייהם והשקעה מועטה
ככל שניתן של משאבים. פרויקט זה הינו ניסיון בכיוון זה ומטרתו לפתח מערכת קרקעית
אשר תוכל לסייע ברכישת מטרות באמצעות סמן לייזר. טכנולוגיית הסימון בלייזר מושתתת
על עיקרון התבייתות של פגז מונחה לייזר על סימון לייזר באמצעות מערכת עקיבה
מתוחכמת הממוקמת על הפגז עצמו וסמן לייזר אשר מופעל ע"י גורם שני בשדה הקרב.
המערכות
הקיימות כיום כוללות סימון באמצעות מזל"טים וכוחות חי"ר מיוחדים. לשני
הפתרונות הללו קיימים חסרונות מסוימים:
כוחות
חי"ר- הבעיה העיקרית היא סיכון חיי האדם.
מזל"טים- 1) קושי בסימון מטרות המוסתרות מן האוויר.
2) עלות גבוהה מאוד הן של הפעלה והן של
המערכת.
3) הפעלה של מערכת מורכבת ויקרה כזו דורשת התערבות של גורמים צבאיים רבים.
הפתרון
הנוסף אותו הצעתי היא מערכת טלאופרטור
קרקעי אשר ישא עליו את סמן הלייזר ואשר תשלט תוך סיכון מופחת לחיי המפעיל,
מחיר מערכת כזו קטן בהרבה ממערכת מורכבת כשל מזל"ט, והפעלתה נעשית תוך שימוש
בכוח אדם מועט יחסית.
עיקר
העבודה התרכזה בפיתוח מערכת שתוכל להתמודד עם השטח. פתרון של בעיות כגון נסיעה
היגוי ומעבר מכשולים תוך שידור מידע ותמונה למפעיל וקבלת הוראות חזרה. לשם כך תוכננה
המערכת הבאה:
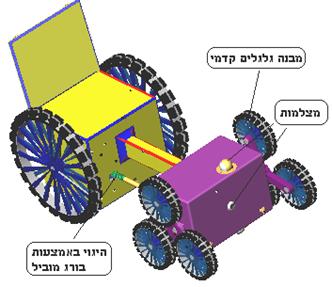
פתרון הבעיות שהוזכרו נראה בשרטוט:
 מערכת ההנעה- הנסיעה היא על בסיס של הנעה
אחורית באמצעות מנוע חשמלי כך שפעולת המערכת שקטה ונצילותה גבוהה. את האנרגיה
למערכת מספקת סידרה של שלושה מצברים במקביל
הנישאים ע" המערכת, המצברים הם נטענים כך שניתן פשוט להטעינם לאחר כל
הפעלה. בנוסף לכך הושאר מקום על הרובוט להוספה של מצברים נוספים במידת הצורך.
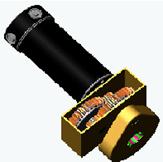
המנוע (בתמונה) מחובר לתמסורת רגילה ומשומנת כאשר השימון מתבצע בתוך תיבת התמסורת.
מערכת ההנעה- הנסיעה היא על בסיס של הנעה
אחורית באמצעות מנוע חשמלי כך שפעולת המערכת שקטה ונצילותה גבוהה. את האנרגיה
למערכת מספקת סידרה של שלושה מצברים במקביל
הנישאים ע" המערכת, המצברים הם נטענים כך שניתן פשוט להטעינם לאחר כל
הפעלה. בנוסף לכך הושאר מקום על הרובוט להוספה של מצברים נוספים במידת הצורך.
המנוע (בתמונה) מחובר לתמסורת רגילה ומשומנת כאשר השימון מתבצע בתוך תיבת התמסורת.
מנוע
נוסף זהה למנוע האחורי הוא המנוע הקדמי הנועד לסיבוב מבנה שלושת הגלגלים. קונפיגורציה
זו מעניקה למערכת יתרון במעבר מכשולים, כך שהמערכת תוכל להתמודד עם תנאי הסביבה
ולעבור חלק ניכר מן המכשולים בהם תתקל. המנוע הקדמי מחובר למבנה שלושת הגלגלים
ומסובב את המבנה כולו על מנת לעזור למנוע האחורי בשעת טיפוס מעל גבי המכשול.
עמידות
בהתהפכות-
התאמה נוספת של המערכת לתנאי השטח היא חסינותה להתהפכות, המערכת נבנתה מכאנית כך
שלמעשה אין לה מצב הפוך מכיוון שנועדה לעבוד בשני המצבים. כפי שניתן לראות בשרטוט
קוטר הגלגלים עולה על גודל המערכת כך שהמערכת ניצבת על גלגליה גם לאחר התהפכות,
בנוסף על כך כל תתי המערכות (המנועים המצברים..) נבחרו כך שיוכלו לעבוד גם הפוך
וקובעו אל גוף המערכת.
מערכת
ההיגוי- היגוי
המערכת בנוי כך שכיוון הנסיעה נקבע ע"י כיוון המבנה הקדמי שיכול לשנות את
כיוונו וכך לשנות את כיוון הנסיעה. השינוי עליו מדובר מתבצע באמצעות מערכת
ההיגוי שמסוגלת לדחוף או למשוך את המבנה
הקדמי באמצעות בורג מוביל.
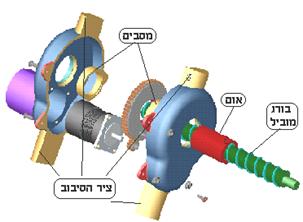 קונספט הפעולה של המערכת מתבסס
על מנוע המסובב דרך תמסורת את אום הבורג המוביל סיבוב זה משנה את מיקומו של הבורג
המוביל קדימה ואחורה כאשר המנוע נשלט בעצם ע"י המפעיל. מבנה המנוע יושב כולו
על ציר סיבוב שמאפשר למבנה לשנות את כיוון היציאה של הבורג המוביל דבר הנחוץ
כתוצאה מתזוזה של המבנה הקדמי וציר החיבור עליו במהלך הסיבוב.
קונספט הפעולה של המערכת מתבסס
על מנוע המסובב דרך תמסורת את אום הבורג המוביל סיבוב זה משנה את מיקומו של הבורג
המוביל קדימה ואחורה כאשר המנוע נשלט בעצם ע"י המפעיל. מבנה המנוע יושב כולו
על ציר סיבוב שמאפשר למבנה לשנות את כיוון היציאה של הבורג המוביל דבר הנחוץ
כתוצאה מתזוזה של המבנה הקדמי וציר החיבור עליו במהלך הסיבוב.
המצלמות- קיימות שלושה מצלמות המורכבות
על המערכת שני מצלמות Pan
& Tilt המשמשות כמצלמות פנורמיות, ומצלמת נהיגה  קבועה אשר כיוונה הוא תמיד קדימה
ומשמשת הן לנהיגה והן לצידוד. המצלמות הפנורמיות נשלטות ע"י המפעיל וכיוונם
נקבע ע"י חיישן המותקן על קסדת המפעיל מודד את כיוון ההסתכלות שלו, ומשדר זאת
בחזרה אל המצלמות. שני המצלמות מורכבות בצורה סימטרית על הרובוט והכוונה היא
שהמפעיל יכול לבחור את המצלמה אתה הוא עובד כך שבמקרה של התהפכות המפעיל פשוט עובר
למצלמה האחרת. מצלמת הנהיגה היא קבועה בחלק הקדמי של המערכת והיא משדרת ברציפות
חזרה אל המפעיל אך כיוון ההסתכלות שלה אינו ניתן לשינוי.
קבועה אשר כיוונה הוא תמיד קדימה
ומשמשת הן לנהיגה והן לצידוד. המצלמות הפנורמיות נשלטות ע"י המפעיל וכיוונם
נקבע ע"י חיישן המותקן על קסדת המפעיל מודד את כיוון ההסתכלות שלו, ומשדר זאת
בחזרה אל המצלמות. שני המצלמות מורכבות בצורה סימטרית על הרובוט והכוונה היא
שהמפעיל יכול לבחור את המצלמה אתה הוא עובד כך שבמקרה של התהפכות המפעיל פשוט עובר
למצלמה האחרת. מצלמת הנהיגה היא קבועה בחלק הקדמי של המערכת והיא משדרת ברציפות
חזרה אל המפעיל אך כיוון ההסתכלות שלה אינו ניתן לשינוי.
המיקום- ידיעת מיקום הרובוט בכל שלב
נעשית באמצעות שני מערכות. המערכת הראשונה היא מערכת המצלמות על הרובוט ואילו
המערכת השנייה היא מערכת הניווט הלוויני G.P.S המחוברת אל המחשב.
האינפורמציה נשלחת אל המפעיל ובאמצעותה מסוגל המפעיל לאתר את מיקומו של הרובוט בכל
שלב.
מערכות
המחשב- תפקידו
של המחשב בפרויקט כזה הוא מכריע ושולט על אספקטים חשובים של התפעול כגון: התקשורת
בין הטלאופרטור למפעיל, יצירת ממשק עבודה נוח למפעיל, וכן שליטה על כל הלוגיקה
הדרושה להפעלת המערכת כגון הפעלת המנועים וצידוד המצלמות. מערכות המחשב עיבוד
התמונה והתקשורת נבחרו מתוך הקיים כיום בשוק.
תוצאות
ומסקנות
המסקנות העיקריות מן הפרויקט הם שכיום ניתן
להתגבר על חלק גדול מן המכשולים שהיו בתחילת הדרך עם נושא הטלאופרציה והפתרונות
העומדים לרשותי בתור מתכנן טובים ומגוונים. עם זאת יש לציין כי מספר אספקטים של
המחשוב והתקשורת הם עדיין בעיתים כגון שליחה של וידאו בזמן אמת לבעיה מורכבת זו
אמנם קיים פתרון אך לטווחים ארוכים עדין קיימת בעיית ה-DELAY של
הוידיאו ויש להתחשב בכך.
בעיה
נוספת היא בעיית ההתמודדות של המערכת עם כוחות עוינים בשטח, מאחר וזוהי מערכת
צבאית תסריט אפשרי בהחלט במהלך הפעולה הוא התקלות באויב, פתרונות למקרה זה יכולים
להשתנות מהרכבה של כלי נשק על המערכת במטרה לנטרל את האויב או מתן אפשרות בריחה
למערכת. מתן פתרון לכך יעשה בכל מקרה כתלות ברצון של הצבא.
נקודה אחרונה שחשוב לציין היא כי המערכת עברה את
שלב התכנון הראשוני אך היא איננה מוכנה לצאת מחר אל שדה הקרב. הקונספט הרעיוני
קיים אך עדין נחוץ לבנות מודל של המערכת ולבדוק את הבעיות העולות כגון התאמה בין
הרכיבים האלקטרונים בעיות של רעש תקשורת וכל בעיה נוספת העולה מן הניסויים.