
הפקולטה להנדסה - המגמה להנדסה מכנית
רובוט להזנה ופריקה של מחרטת CNC
תקציר לספר הפרויקטים
פרוייקט גמר

הכין: ניר גלר
מנחה: רם טלמור
יוני 2002
תקציר מנהלים
נושא הפרויקט
מחרטות CNC מהוות מרכיב מהותי בתהליכי הייצור המתקדמים בתחומים נרחבים, כגון :
תעשיית הרכב, תעשיית התקשורת, מכניקה כללית וכו'.
על מנת לאפשר למחרטת CNC לחרוט באופן רציף וללא
התערבות מפעיל, מתקינים בה רובוט שמזין ופורק אותה.
מטרת הפרויקט
1.
חקירה
ולימוד מעמיק של תחום עיבוד השבבי והאוטומציה על מנת לקבל הבנה עמוקה יותר על נושא
הפרויקט, שלב זה כלל :
·
איסוף אינפורמציה – קטלוגים, ספרות, כתבי-עת.
·
ביקור במפעלים – לקבלת מושג מוחשי על הנושא.
·
שיחות עם אנשי מקצוע – לצורך הבנת המערכות וניתוחם.
2.
ריכוז
וסיכום כל הפתרונות הקיימים בשוק – בדיקה מעמיקה של כל חלופה בעבור : יתרונות/חסרונות,
עלות, תחזוקה וכו'.
3.
פיתוח
חלופות חדשות לפתרון – בדיקתם עבור אותם פרמטרים מסעיף 2.
4.
בחירת
החלופה אשר תבחר לתכנון על סמך בדיקה עבור כל הדרישות והפרמטרים של הפרויקט.
5.
תכנון
החלופה שנבחרה.
מהות העבודה
מתוך הכרה והבנה של המערכות הקיימות פיתחתי קונספט חדש
אשר משלב בתוכו את היתרונות של מספר חלופות שונות, אם כן מהות העבודה היא :
- פיתוח
החלופה החדשה.
- שילובה
ובדיקתה במערכת הכוללת של מחרטה, משטחי חומרי גלם וכו'.
- תכנון מבנה
המערכת.
- תכנון
ובחירה עקרוני של רכיבי המבנה
(מסבים, רצועות, מנועים וכו').
 תכנון יחידת הקצה – הזרוע הרובוטית.
תכנון יחידת הקצה – הזרוע הרובוטית.
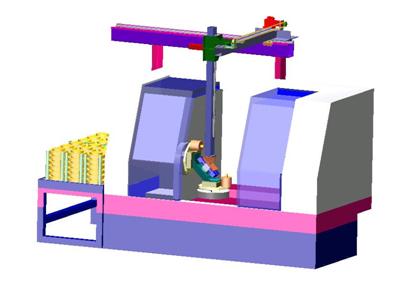
איור 1 – המערכת הרובוטית יחד עם המחרטה
ומשמאל משטח חומר הגלם וחלקים מעובדים
הפתרון הנבחר
כאמור, הפתרון שנבחר הוא פיתוח קונספט חדש שמשלב תכונות
ממספר פתרונות קיימים.
תחילה אציג את הפתרונות הקיימים ואציין איזה תכונה
מרכזית נלקחה ממנו.
פתרון
א – רובוט מפרקי

היתרון
העיקרי של פתרון זה
- לרובוט זה 6 דרגות חופש ולכן הוא גמיש
מאוד ביכולתו להגיע למיקומים שונים במרחב באוריינטציות שונות.
חסרונות
- מחיר גבוה.
- נמצא בחזית המכונה.
- מתפעל בדרך-כלל מכונה אחת.
פתרון ב – רובוט עילי
יתרונות
- נמצא מעל
המכונה, לא תופס שטח רצפת ייצור ולא מפריע בתפעול.
- מתאים לתפעול
מספר רב של מכונות.
 זול יחסית.
זול יחסית.
חסרונות
- למערכת זו
יש 2 צירי תנועה וציר לסיבוב הזרוע ולכן היא מוגבלת באפשרויות המיקום והתנועה
של יחידת הקצה.
- כפי שרואים
בתמונה, יש צורך במערכת נוספת אשר מניעה את חומרי הגלם אל המקום ממנו הם
צריכים להילקח.
הקונספט החדש
הקונספט החדש משלב בתוכו את היתרונות המרכזיים של
הפתרונות שהוצגו בעמוד הקודם ולכן קונספט זה יהיה בעל מבנה עילי הנמצא מעל המכונה –
יתרון שנלקח מהרובוט העילי.
ויהיה בעל 3 צירי תנועה וציר נוסף לסיבוב הזרוע – דבר הנותן
גמישות גדולה יותר במיקום יחידת הקצה ולכן מבטל את הצורך במערכת נוספת לסידור
והנעת חומרי הגלם.
אלו התכונות המרכזיות הנלקחו מן הפתרונות הקיימים, תאור
המערכת ויתרונות נוספים אשר לא מצויים בפתרונות הקיימים מתוארים בעמודים הבאים
ובסיכום.
תיאור הקונספט החדש

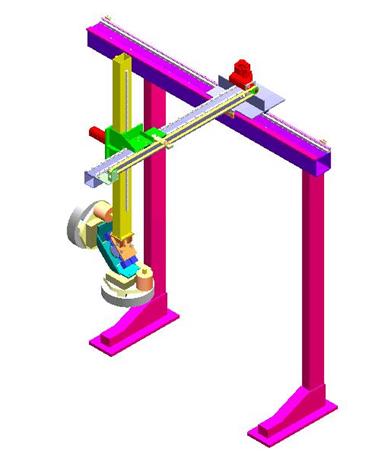
המבנה המתואר הינו בעל 3 דרגות חופש דבר המאפשר ליחידת הקצה (הזרוע
הרובוטית) להיות בכל מקום במרחב. המבנה כולו עומד על 2 עמודים נושאים הנמצאים
במרחק 2 מטר זה מזה וגובהם 2.8 מטר. קורת ציר Z מחברת את שני העמודים בחלקם העליון. קורת ציר Z היא סטטית ומקבילה
לציר הספינדל של המחרטה. בניצב לקורת ציר Z מחוברת קורת ציר X, קורה זו מורכבת ממשטח פלדה אשר אליו מרותכת הקורה
עצמה, המשטח הוא זה שמחבר בין קורת ציר Z וקורת ציר X, קורת ציר X היא דינאמית ונעה בניצב ולאורכה של קורת ציר Z.
לאורכה של קורת ציר X מחוברים שני מסלולים, אל המסלולים מחובר בעזרת
מסבים ליניאריים נושא קורת ציר Y. בסמוך לשורש קורת ציר X ובניצב לה מחובר מנוע ובקצה הקורה מחובר גלגל כאשר
ביניהם מחברת רצועת תזמון אשר תפוסה אל נושא קורת ציר Y וכך
מתאפשרת הנעת ציר Y
לאורכו של ציר X
.
קורת ציר Y
מחוברת אל נושא קורת ציר Y, לאורך קורת ציר Y מחוברת בצידה הפנימי מסילה ובצידה החיצוני פס
שינים. תנועתה של קורת ציר Y בכיוון מעלה מטה מתבצע ע"י מנוע המחובר לנושא
קורת ציר Y
ופס השינים שמחובר לקורה. אורכה של קורת ציר Y 2 מטר ובחלקה התחתון מחוברת יחידת הקצה – הזרוע
הרובוטית.
![]()
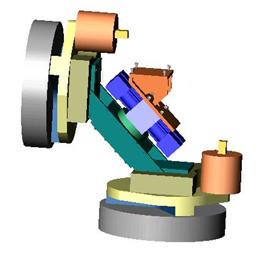
הזרוע הרובוטית היא המערכת שנמצאת בקצה
קורת ציר Y והיא מורכבת ממספר אלמנטים. תפקיד הזרוע הוא לבצע למעשה את טעינת
ופריקת החלקים מן המחרטה . המתאם הוא חלק פלדה בצורת שני משטחים בזווית של 45
מעלות ביניהם הוא מחבר בין מערכת הזרוע לבין קורת ציר Y, אל המתאם מחובר ה –rotary actuator תפקידו לבצע את
התנועה הסיבובית של הזרוע הרובוטית ,אל הציר היוצא ממרכז ה – rotary actuator מחובר חלק פלדה
גלילי אשר מעביר את התנועה הסיבובית אל הגוף. הגוף מורכב משישה חלקי פלדה המחוברים
ביניהם בעזרת ברגים ויוצרים יחד מבנה כמתואר באיור, אל שני המשטחים המחוברים לגוף מתחברים התפסניות
שתפקידן לאחוז בחומר הגלם מרגע טעינתו במשטח חומרי הגלם ועד הגעה לתפסנית המחרטה.
סיכום
לאחר תאור כללי של המערכת אציין את
התכונות המרכזיות והיתרונות שלה על פני מערכות אחרות
- הזרוע הרובוטית בעלת 2 ידיים מאפשרת החלפה מהירה בין החלק המעובד
(הנמצא במחרטה) ובין חומר הגלם החדש (הנמצא בתפסנית אשר בזרוע הרובוטית).
ע"י סיבוב של 180 מעלות מגיע החלק החדש אל מול תפסנית המחרטה והוא מוכן
לטעינה, במידה ומימדי חומר הגלם מאפשרים את הסיבוב בתוך החלל הפנימי של המחרטה
אזי הוא נעשה שם על מנת לחסוך בזמן, ובמידה שלא ניתן לבצע את הסיבוב שם אז
מעלים את ציר Y מעל המחרטה ומבצעים את הסיבוב שם. יש לציין שהזרוע הרובוטית
בעלת יד כפולה חוסכת זמן מבוזבז רב של המתנת המחרטה לחומר גלם, במיוחד נכון
הדבר כאשר משטחי הגלמים נמצאים רחוק יחסית או כאשר הרובוט משרת יותר ממחרטה
אחת כפי שמתואר בסעיף הבא.
- ניתן להאריך את קורת ציר Z ובכך לשרת מספר מחרטות כרצוננו הנמצאות
בהמשכה של המחרטה הראשונה – דבר זה ניתן ליישום ללא כל שינויים במערכת (פרט
להארכת ציר Z כמובן) אך לעומת זאת לא ניתן ליישום ברובוט מפרקי.
- כפי שנראה בעמודים הקודמים הקורה
המרכזית אשר ממוקמת מעל המחרטה נתמכת רק בשורש הקורה ואילו קצה הקורה תלוי
ללא תמיכה (cantilever beam). ברור כי קורה
כזו נתונה לשקיעה גדולה הרבה יותר ביחס לקורה הנתמכת משני צידיה (simple support/fixed support) תחת אותו העומס.
- למרות האמור בסעיף הקודם חשוב לציין
כי מבנה מסוג זה מאפשר את פעולת המערכת עם מספר סוגי מכונות ועם מכונות
במימדים שונים ללא כל צורך בשינויים בתכנון וזאת מאחר ואין צורך שהקורה
המרכזית תהיה ארוכה יותר מן המכונה (כפי
שנזקק בתכנון של מבנה הנתמך בשני צדדיו ושמקובל מאוד).
- מבנה מסוג זה מאפשר הוזלה ניכרת בעלויות הרכש והייצור מאחר והוא
מבטל את נחיצותם של רכיבי מבנה רבים, כגון מערכת נוספת של עמודים נושאים
וקורת ציר Z (על כל רכיביהם) שאמורה להיות בצדה השני של קורת ציר X.