הפקולטה להנדסה -
המגמה להנדסה מכנית
מאי 2002
בקרת
גלגול של טיסן באמצעות מרעדים פיאזו-אלקטריים
תקציר
לספר הפרוייקטים
פרוייקט גמר
מנחה: פרופ' אליעזר קיט

נושא הפרוייקט
פרויקט זה עוסק בתיכון וניסוי מערכת היגוי אלטרנטיבית.
בשונה מההגאים הסטנדרטים (הגה גובה, הגה כיוון, מאזנות)
הפועלים ע"י הזזה של חלק מהכנף או כולה, מערכת היגוי המוצעת מבוססת על בקרת
זרימה אקטיבית בעזרת מרעדים פייזואלקטריים
אשר ישנו את אופי הזרימה על הכנף. השליטה על משטר הזרימה תאפשר לנו לשלוט
על העילוי של הכנף, ובאמצעות יצירת הפרשים בעילוי בין שני צדי הכנף נוכל לגרום
לכלי הטיס לגלגל.
היתרון המרכזי בשיטה
של בקרת זרימה אקטיבית הוא היכולת לבצע היגוי של כלי הטייס ללא תזוזה של חלקים
בגוף כלי הטייס, דבר שיפחית את חתימת המכ"ם והסיכוי לגילוי כלי הטייס. יתרון
זה יכול להיות שימושי עבור כלי טייס צבאיים בכלל, ומזל"טים
"חמקניים" בפרט.
מטרת
הפרויקט
במסגרת הפרויקט נדרש לתכנן מערכת בקרת זרימה אקטיבית שתוכל
להיות מורכבת על גבי כלי טיס קטן . להלן מספר דרישות :
- ההתקן צריך לגרום ליצירת מומנט גלגול על הכנף ללא הזזה של
חלקים בכנף (כגון מאזנות, כנפונים וכו'). יש להדגיש שהמטרה אינה להגיע לתמרון
בקצבים שאמצעי היגוי קונבנציונאליים
מאפשרים, אלא להיגוי מתון.
- גודלו של ההתקן צריך להיות כזה שיתאים מבחינה מימדית להתקנה בכנף של כלי טייס קטן.
- משקלה הכולל של המערכת צריך להיות נמוך ככל שניתן בכדי שיהיה ניתן לנשיאה ע"י כלי טייס קטן.
- המערכת צריכה להיות אמינה ועמידה בפני תנאי טיסה, כלומר
רעידות, חבטות וזיהומים חיצוניים.
מטרה נוספת, שאין להמעיט בחשיבותה, היא תיעוד מדויק
לצורך המשך פעילות וחקר הנושא.
מהות העבודה
העבודה במסגרת הפרוייקט מחולקת למספר שלבים עיקריים. להלן
השלבים הנמצאים תחת תחום אחריותי בפרויקט.
השלב הראשון הינו לימוד מעמיק
של הנושא מבחינה תיאורטית (יורחב במסגרת - רקע תאורטי) וסקירה של המחקרים העיקריים
שנעשו בתחום (יורחב במסגרת – סקר ספרות).
השלב השני הוא בחירת תוכנה
מתאימה על מנת לבצע אנליזת זרימה (יורחב במסגרת - סקר תוכנות).
השלב השלישי הוא בניית דגם
ממוחשב של הכנף (בתוכנת solidworks) במספר קונפיגורציות אפשריות, ובחינה
(חישובית) של השינוי בעילוי הכנף בכל אחת מהן. בשלב זה נעשה שימוש בתוכנה להדמיית
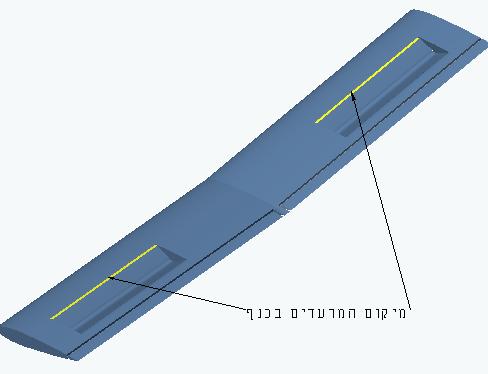
משטר הזרימה הצמיגה סביב חתך הכנף בו יותקנו המרעדים, וחישוב על מנת לקבוע את
המיקום המועדף של המרעדים לאורך הכנף.
השלב הרביעי הוא החלטה על
שינוי הכנף הקיימת או יצור כנף חדשה והתקנת המרעדים עליה (לפי השיטה שנקבעה
ע"י אפי, שותפי בפרוייקט זה, כיעילה ביותר). לאחר מכן, נערך חישוב הפוטנציאל
לגלגול, עבור הכנף שנבחרה, ע"י מציאת השינוי במקדם העילוי על הכנף כתלות
בהפעלת המרעדים. חישוב זה התבסס על הנתונים שהתקבלו מניסוי המנהרה הדו מימדי
שהתבצע ע" יונתן.
השלב החמישי הוא תיכון התקן
לרתימת הכנף במנהרת הרוח והכנת הכנף לניסוי התלת-מימדי.
השלב האחרון הוא ניתוח
התוצאות בניסוי המנהרה (לאחר שעובדו באופן ראשוני ע"י יונתן, שותפי
בפרוייקט), ובדיקת אופן השפעתם אם וכאשר יותקנו על גבי כלי טייס קטן.
סיכום
פרויקט זה היווה בדיקת היתכנות עבור בקרת גלגול ללא הנעה של
משטחי היגוי. היתרון המרכזי הטמון בהעדר תזוזה של חלקים בגוף כלי הטייס הוא היכולת
לשמירה על חתימת מכ"ם נמוכה, המפחיתה את הסיכויים לגילויו. בניסוי שנערך הוכח
כי אכן ניתן לבצע תמרונים בכלי הטייס גם ללא הנעת משטחי היגוי, ולפיכך הוא השיג את
מטרתו.
לראשונה בפרוייקט זה, בוצע ניסוי במהלכו הושג אפקט של גלגול
כנף בעזרת בקרת זרימה בלבד. הישג זה יכול להוות צעד ראשון בפיתוח של מערכת היגוי
משנית עבור כלי טיס, אשר תהווה תחליף אפשרי למערכת ההיגוי הסטנדרטית. לאור זאת,
תוצאות הפרוייקט יובילו לרישום פטנט בנושא.
מטרתו הראשונית של הפרוייקט הייתה להתקין מערכת בקרת זרימה
אקטיבית על גבי טיסן הנשלט ע"י שלט רחוק, להטיסו ולגרום לו לבצע גילגול. עם
זאת, בפועל ניסוי זה עדיין לא בוצע בשל קוצר זמן.
בכדי שניתן יהיה לבצע ניסוי טיסה מומלץ לערוך ניסוי מנהרה
נוסף, בו תותקן הכנף בצורה בה תוכל להיבדק השפעת הפעלת המרעדים על מקדם הגרר,
ובעזרת נתון זה לקבל תמונה רחבה יותר לגבי משטר הזרימה סביב הכנף בזמן הפעלת
המרעדים. כמו כן לא הושלם חלק הפרוייקט הקשור בהפעלת המרעדים ודגימת ואחסון/שידור
הנתונים (שהיה אמור להיעשות ע"י סטודנטים להנדסת אלקטרוניקה).
נושא נוסף שיש לבחון הוא בעיית נשיאת
המשקל,במהלך הפרוייקט לא נעשה סקר שוק מקיף בנושא מקורות המתח עבור המרעדים, מומלץ
לערוך בדיקה בנושא ולמצוא מערכת אלקטרונית שתתאים מבחינת מימדה ומשקלה לנשיאה על
גבי טיסן
בנוסף יש להדגיש
שמערכת זאת אינה אמורה להגיע לתמרון בקצבים שאמצעי היגוי קונונציונליים מאפשרים,
אלא למה שנקרא "Mild
Manuvering", כלומר להיגוי מתון.
לכן, יש לבחון אמצעים לשילוב בין מערכת היגוי קונבנציונאלית, בטיסה רגילה, לבין
מערכת היגוי בעזרת בקרת זרימה, בטיסה מבצעית.
מבחינה כלכלית
עדיין מוקדם לדון בנושא הכדאיות הכלכלית מכיוון שהרעיון עדיין לא בשל, אך לאחר
המשך הפיתוח וביצוע ניסויים נוספים ניתן יהיה לבצע הערכת עלות עבור מערכת מעין זו.
יעדי הידע והטכנולוגיה הללו הינם בעיקר גורמים בתעשיות הצבאיות בארץ ובחו"ל
,שעשויים לגלות עניין במערכת מסוג זה עבור מטוסים זעירים ללא טייס ובמקרים רבים
העלות משנית ליכולת לבצע משימה מה עוד שמדובר ברכיבים "מן המדף" שעלותם
נמוכה .
כנף הטיסן