This project has received funding from the European Union's Horizon 2020 research and innovation programme under the Marie Składowska-Curie grant agreement No 708932.

|
Research Fellow: Anatoly Khina
This project has received funding from the European Union's Horizon 2020 research and innovation programme under the Marie Składowska-Curie grant agreement No 708932. |
|
The least initial deviation from the truth is multiplied later a thousandfold.
|
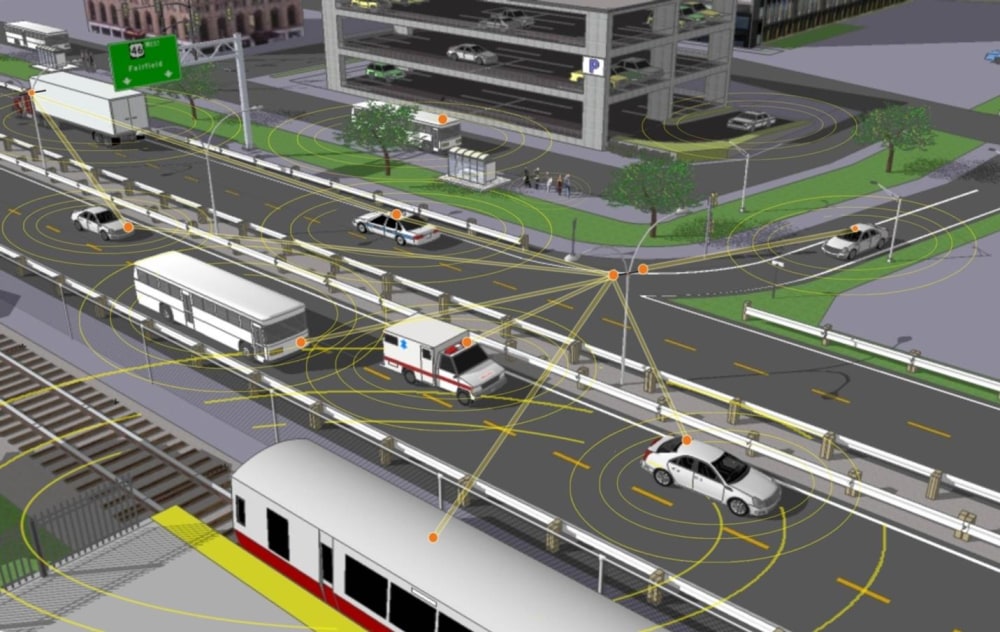
Photo taken from this NBC news article. Check this MIT tech review about self-driving cars. |

|
The remote-controlled Da Vinci robot surgeon performing surgery. Photo taken from the following interesting BBC article. |
|
For an explanation about this experiment (and more) you are invited to watch this talk by John Doyle. |

|
Photo taken from the following Bold Business article.
For more details, check:
|

|
Photo taken from the following New Atlas article and is based on the following Nano letters publication. For a review of recent advances in the design of nanobots, check this article. |